LEAGの高精度ARマーカ技術
ARマーカと独自の画像処理技術による
高精度の3次元空間計測
-
高精度
位置±1㎜/m
角度±1度 -
高耐久
建設現場など
屋外対応 -
広範囲
0.5m〜30mの
幅広い測定エリア
高い信頼性と使いやすさで、土木・建設・物流・医療など
様々な業界で高精度ARマーカが利用可能になりました。
-
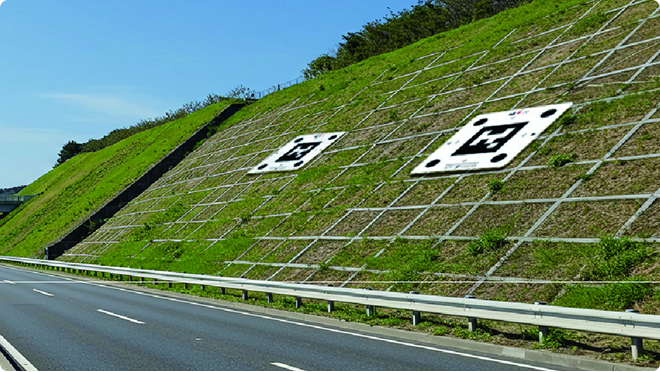
安全な場所から山間部斜面や道路法面の地すべりを監視
土木・インフラ業
安全/省人化/品質管理 -

柱と梁の位置や姿勢を計測・情報管理してクレーン作業を自動化
建設業
安全/省人化/遠隔制御/自動化 -

棚と商品の位置や姿勢を高精度で認識する自動品出しシステム
物流業
省人化/工数削減
※図は利用イメージです
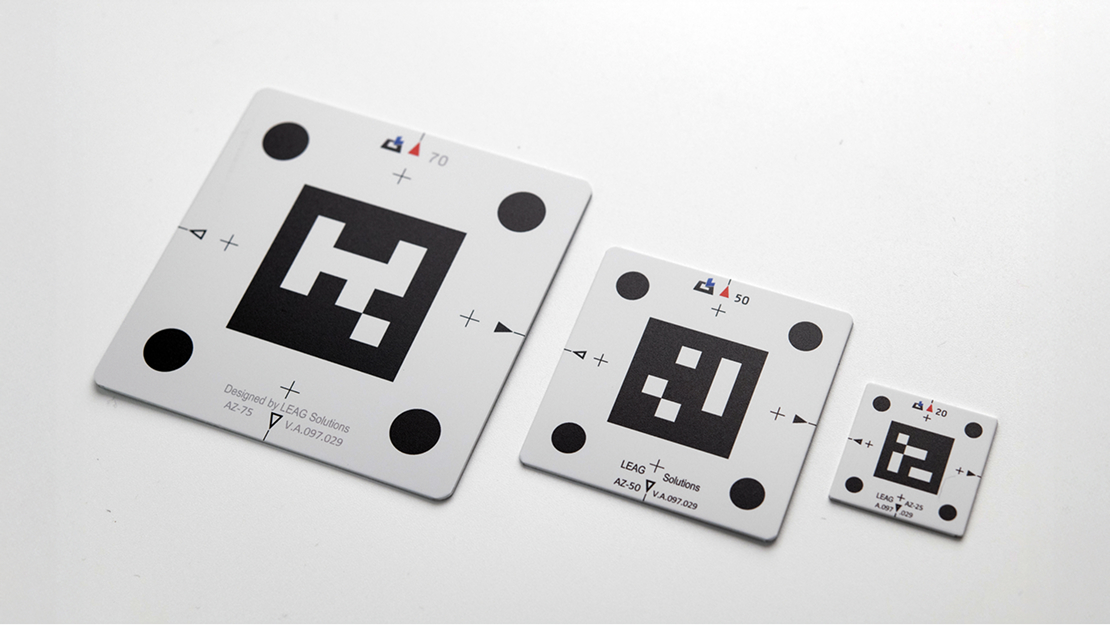
基礎技術:産総研マーカ
-
AIST開発の高精度マーカ
国立研究開発法人産業技術総合研究所が開発
高精度姿勢計測用の特殊光学系を採用
-
角度を検出
LEAG(Lenticular Angle Gauge)
見る角度に応じて黒線が移動する特殊パターン
-
姿勢反転を検知
FDP(Flip Detection Pattern)
見る角度に応じて白と黒が切り替わる特殊パターン
https://unit.aist.go.jp/harc/symposium/HARCS2022/mp4/8_Tanaka.mp4
https://www.aist.go.jp/aist_j/magazine/20200402.html
https://www.kenkai.jaxa.jp/library/pamphlets/pdf/saizensen5.pdf
マーカの技術応用例
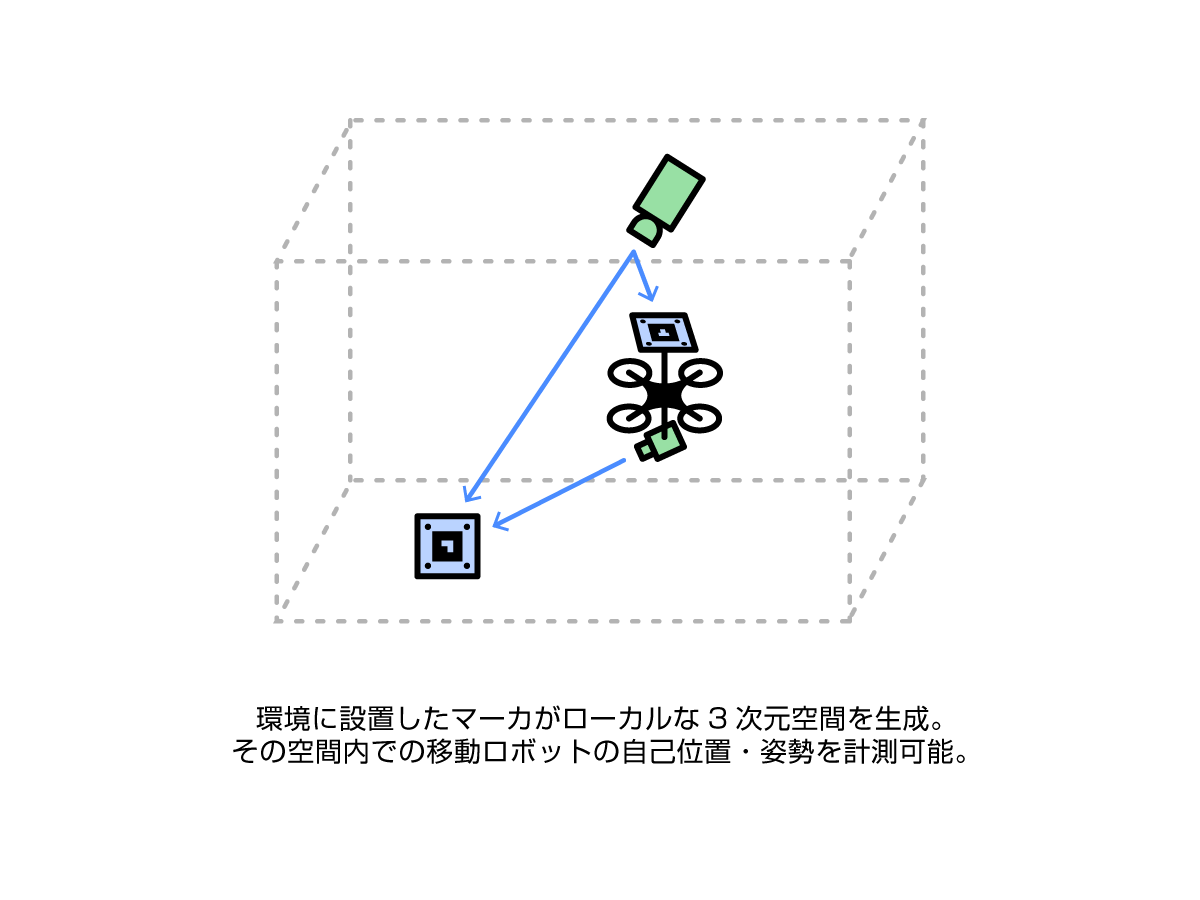
応用例 1ドローン等の移動ロボット制御
移動ロボットに搭載のカメラや環境に設置したカメラから高精度マーカを認識することで、自己位置・姿勢の把握ができる。
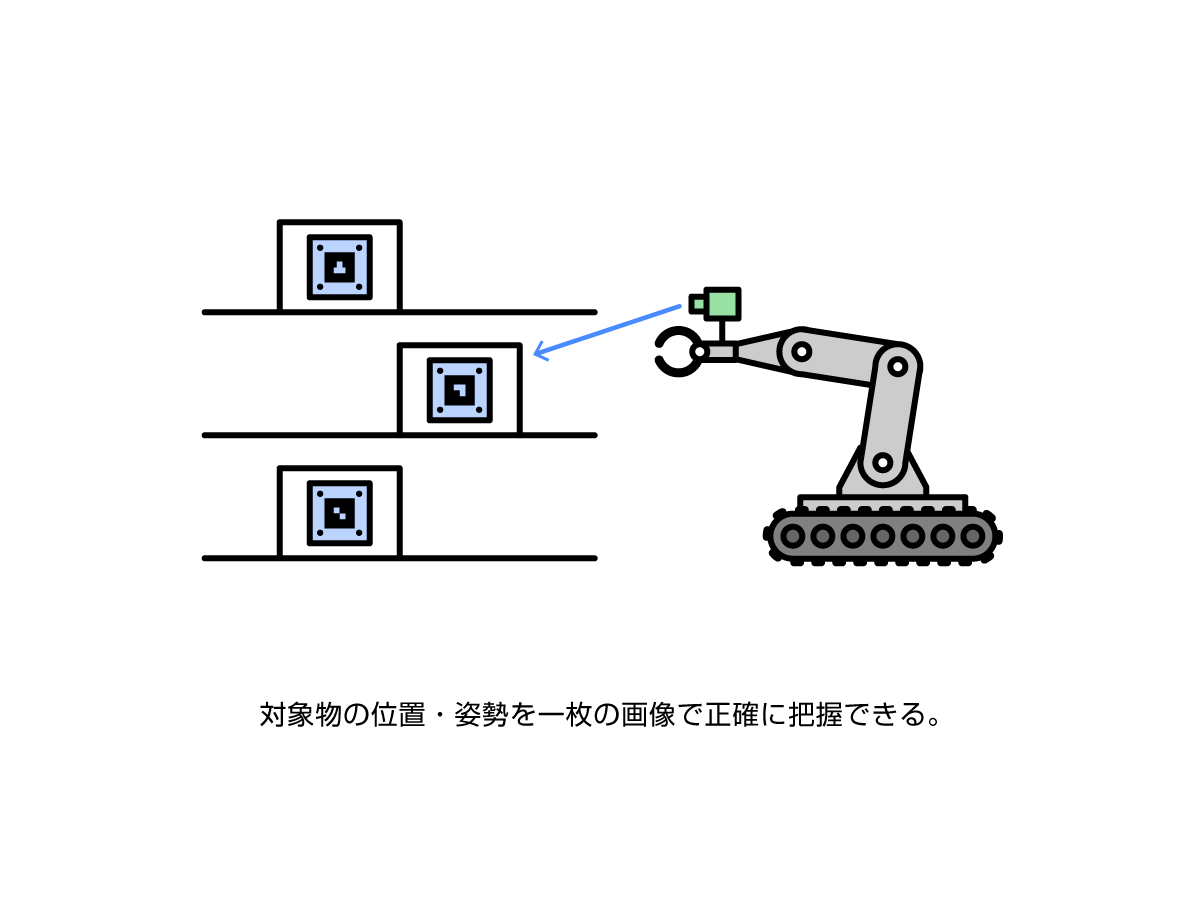
応用例 2ロボットハンド制御
ロボットハンドに搭載のカメラから対象物に設置した高精度マーカを撮影するだけで対象物の位置と姿勢を高精度に把握できる。
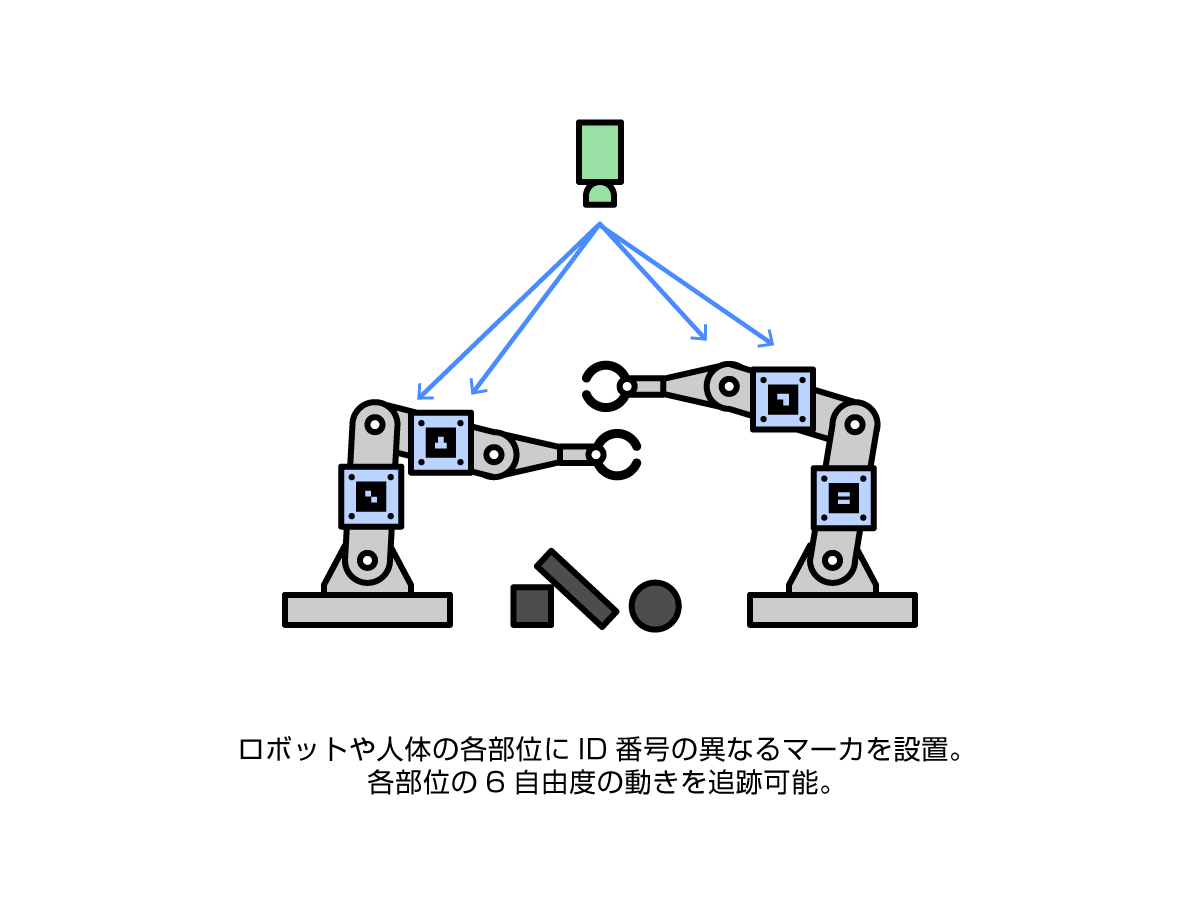
応用例 3モーションキャプチャー
1枚のマーカで1つの部位の位置・姿勢を計測可能。マーカのID番号認識機能により、計測部位の特定も容易。少ない設置マーカ数でリアルタイムの動作解析を実現。
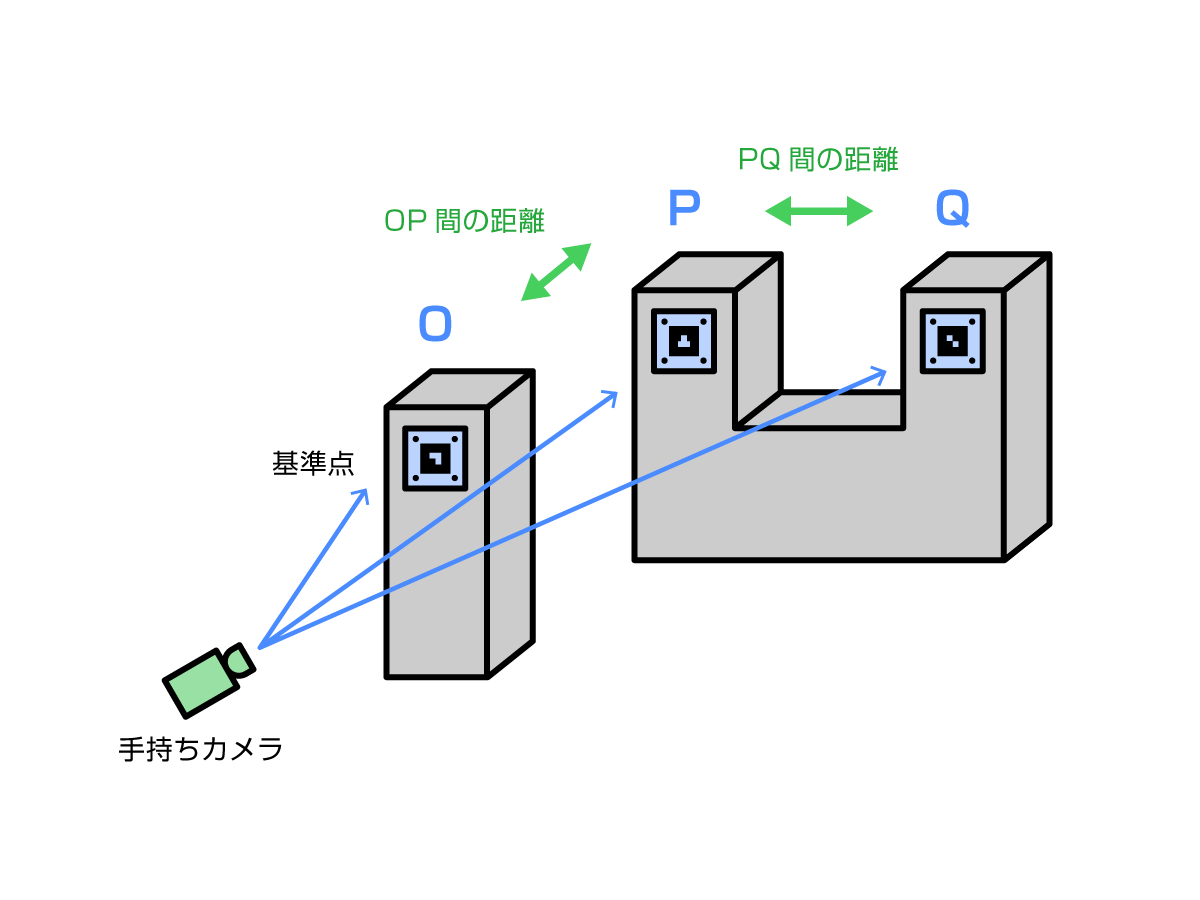
応用例 4管理、記録
被写体とマーカを同時に撮影することで、画像の中に3次元空間情報を記録することが可能。複数マーカの利用により、マーカ間の相対的な位置・姿勢の変位量の情報も記録可能。